发布日期:2026-03-02 10:42点击次数:

本篇著作被 ICRA 2026 接纳并获取 IROS 2025 双料 Workshop 最好论文,第一作家张子哲(site: zizhe.io)是宾夕法尼亚大学机器东谈主学硕士生,同期在 GRASP 实验室担任科研助理,导师为 Nadia Figueroa 讲授,连络意思意思涵盖机器学习,安全限制以及东谈主机交互。

论文标题:Viability-Preserving Passive Torque Control
论文连结:https://arxiv.org/abs/2510.03367
花式主页:https://vpp-tc.github.io/webpage/
一、一句话追思
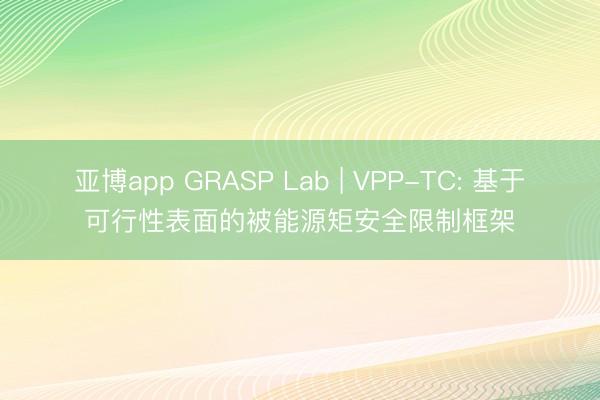
本文提议了 VPP-TC(Viability-Preserving Passive Torque Control),一种基于可行性(viability)表面的被能源矩限制框架。该框架在要道位置 - 速率的增广情景空间中瞻望算安全集结,将可行性照顾调遣为要道加快度(进而力矩)的仿射照顾,通过二次缱绻(QP)及时求解,确保机器东谈主在无穷期间鸿沟内历久处于安全集结内。比较基于限制樊篱函数(CBF)的基线要领,VPP-TC 无需猜度规模函数的二阶导数,限制回路频率更高、轨迹更平滑、旅途更短。
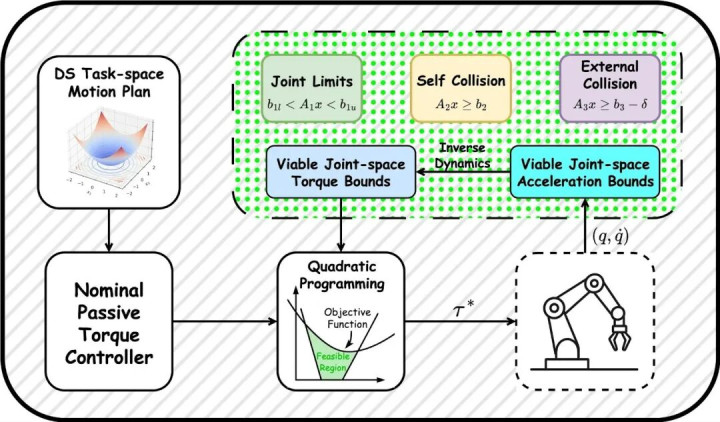
图 1:VPP-TC 限制框架走漏图。要道限位的力矩照顾通过明白要领推导,自碰撞和外部碰撞照顾通过数据驱动要领学习。
二、连络配景与动机
在物理东谈主机交互(pHRI)场景中,机器东谈主需要在与东谈主类近距离合作时保执被迫性(passivity)—— 即经受的能量不少于开释的能量,从而保证在外部扰动下的鲁棒性和厚实性。经典的阻抗 / 导纳限制框架、Port-Hamiltonian 要领以及基于能源系统(DS)的被能源矩限制器已被庸俗连络。
然则,这类被迫限制器时常难题显式的照顾处贤达力,无法保证在通盘任务履行经过中的碰撞幸免和要道限位得志。先前使命 CPIC 欺诈限制樊篱函数(CBF)框架和指数限制樊篱函数(ECBF)来照顾被能源矩限制器,但存在以下问题:
硬照顾之间可能相互突破,导致 QP 不成行;
QP 框架易堕入死锁和要道空间的局部最小值;
ECBF 需要猜度规模函数的 Hessian 矩阵(二阶导数),当规模由神经收罗走漏时,及时性难以保证。
恰是这些局限性,促使作家提议了基于可行性表面(viability theory)的全新安全限制框架。
三、要领详解
3.1 中枢念念想:从 CBF 到 Viability
VPP-TC 的中枢更始在于:在要道位置 q 和要道速率 q̇的增广情景空间中引入安全规模,而非仅在要道位置空间中。在这个增广空间中操作的克己是,安全照顾不错径直推导为要道加快度 q̈的仿射照顾,再通过机器东谈主能源学方程调遣为力矩照顾 —— 通盘经过无需猜度规模函数的二阶导数。
可行性的界说(Definition 1)是:从可行集 V 中的恣意运转情景动身,存在一个限制序列(加快度序列),使得产生的无穷长情景序列历久在可行集内。这比单纯的「可行」(feasible)更强 —— 一个可处事态可能在当年的限制下离开可行集,但一个 viable 情景保证能永久留在安全集内。
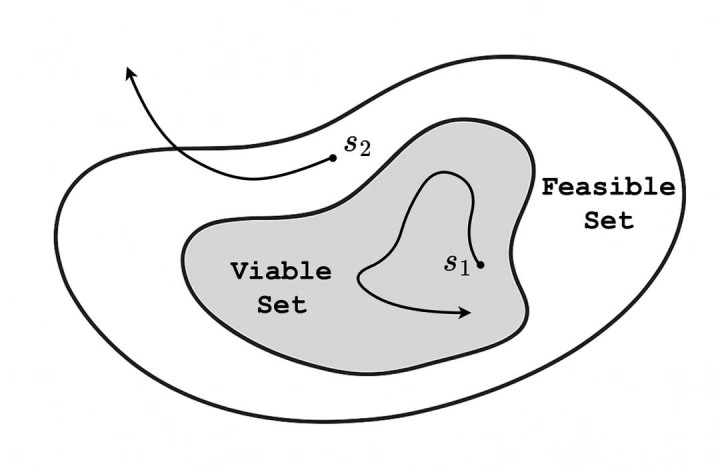
图 2:可行性(viability)认识。情景 s1 既可行又 viable,而 s2 可行但不 viable—— 自然现时得志照顾,但不存在一个限制序列能保证它永久留在安全集内。
3.2 自碰撞幸免照顾(SCA)
作家保守地界说了自碰撞可行性(Definition 2):如若从现时情景动身,以最大减慢反向制动至透叮嘱手的整条制动轨迹上齐不发生自碰撞,则合计该情景是自碰撞安全的。
为学习这个可行集,作家使用了一个基于 Transformer 的神经收罗分类器 Γ(q, q̇)。磨砺数据通过仿真生成:采样 300 万组 (q, q̇) 情景对,模拟制动经过并标注 —— 若制动轨迹无自碰撞则标为 viable,不然标为 non-viable。收罗给与门径 Transformer-Encoder 架构(前馈维度 128、2 个注见地头、4 层堆叠),磨砺 30 个 epoch,测试集准确率达 99.27%,调回率达 99.74%。
图 3:自碰撞可行性数据生成。从情景 (q₀, q̇₀) 动身履行制动直至静止 (qₑ, 0):若整条轨迹无自碰撞,标记为 Safe;不然标记为 Self-Collide。
照顾的实施通过 Taylor 伸开将 ΔΓ(q, q̇) ≥ 0 线性化为对于 q̈的仿射照顾,亚博体育再通过能源学方程调遣为力矩照顾。枢纽公式为:
g_se・M⁻¹τ ≥ g_se・M⁻¹(Cq̇ + G) − b_s
其中 g_se 和 b_s 由规模函数 Γ 对 q 和 q̇ 的一路线度与期间步长猜度得到。
3.3 外部进攻物碰撞幸免照顾(ECA)
对于外部碰撞,作家给与 Bernstein 多项式走漏的艳丽距离函数(SDF) 编码每个机器东谈主连杆的几何。界说可行性保执 SDF 为制动轨迹上的最小瞬时 SDF:
S_v (p, q₀, q̇₀) = min_{t∈[0,T_br]} S (p, q (t))
相通地,通过 Taylor 伸开得到对于 q̈的仿射照顾,并调遣为力矩照顾。值得注主张是,该照顾通过 Δp 项隐式地纳入了进攻物速率信息,因此 VPP-TC 自然具备处理动态进攻物的智力。
3.4 要道位置与速率限位照顾
受 Del Prete (2018) 启发,作家通过明白推导获取要道加快度的高下界 q̈_lb 和 q̈_ub,取位置可行性照顾、速率照顾和硬件加快度限制的错乱,再通过能源学方程调遣为力矩照顾。
3.5 息争的 QP 限制框架
最终的限制框架将通盘照顾息争到一个二次缱绻(QP)问题中:方针函数最小化践诺力矩与口头被迫限制器力矩的偏差,照顾要求包括要道限位(历久激活)、自碰撞照顾(集中规模时激活)、外部碰撞照顾(集中规模时激活)和力矩硬件限制。外部碰撞照顾通过松懈变量软化以保证 QP 可行性。
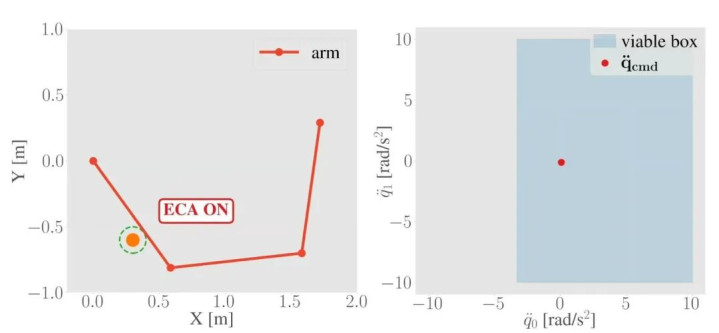
图 4:平面 3-DoF 示例。左:使命空间轨迹。右:在硬件限制 [−10, 10] rad/s² 下的可行加快度域。当外部碰撞照顾激活时,允许的加快度域缩小。
四、实验效果
4.1 仿竟然验
在 7 目田度 Franka Panda 机械臂上(PyBullet 仿真),作家瞎想了三组对比实验:仅自碰撞幸免(SCA)、仅外部碰撞幸免(ECA)、以及全照顾(ALL)。与基线 CPIC 的定量对比如下表:

表 1:CPIC 与 VPP-TC 在不同照顾缔造下的性能对比(5 次实验平均值)
VPP-TC 在通盘缔造下齐权贵优于 CPIC:限制频率培育 1.4–2.4 倍,轨迹长度更短,轨迹抖动缩短了一个数目级以上(颠倒是在 ECA 和 ALL 场景下)。
4.2 真机实验
作家在 7-DoF Franka Panda 真机上考证了三个场景:
自碰撞幸免(SCA):未启用 SCA 时,机械臂因自碰撞预警触发 Reflex Mode 住手盛开;启用 SCA 后安全到达方针。更换 UMI 夹爪后重训收罗,限制器仍有用。
外部碰撞幸免(ECA):濒临静态和动态进攻物,机械臂在被外力推向进攻物时能对抗盛开并保执安全间距;动态进攻物接近时主动回绝。在约 200Hz 的限制频率下达成信得过的全身碰撞幸免。
笼统场景:遥操作按台灯开关任务 —— 仅提供粗鄙方针位置,无瞻望算的避障轨迹。VPP-TC 同期处理外部碰撞(台灯灯体)和自碰撞照顾,安全完成任务。
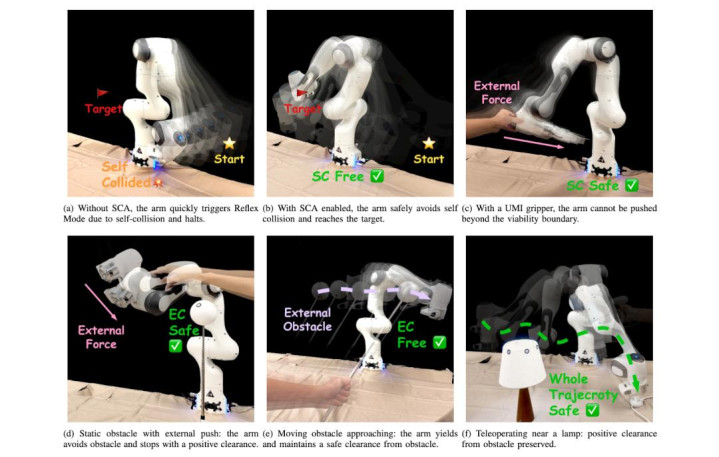
图 5:真机实验。上排:自碰撞幸免(a-c)。下排:外部碰撞幸免(d-f)。轨迹重复浮现照顾激活后机械臂保执正向间距。
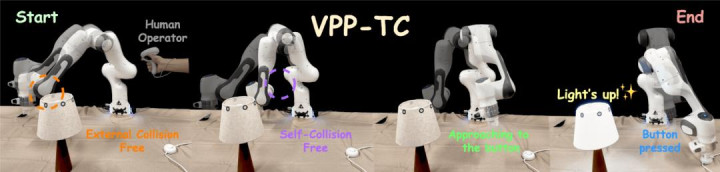
图 6:遥操作任务 —— 仅提供粗鄙方针位置,VPP-TC 确保近灯安全并注意自碰撞,得手完成按灯开关任务。
五、技能亮点与磋议
1. 无需二阶导数。通过在 (q, q̇) 增广情景空间中操作,安全照顾被抒发为对于加快度的仿射函数,仅需要规模函数的一路线度。这大幅缩短了猜度职守,是达成高限制频率的枢纽。
2. 息争框架处理多类照顾。要道限位、自碰撞、外部碰撞三类照顾在销亡 QP 中息争处理,照顾按需激活,框架精真金不怕火优雅。
{jz:field.toptypename/}3. 自然扶持动态进攻物。外部碰撞照顾的 Taylor 伸开中包含进攻物位移 Δp 项,隐式编码了进攻物速率,无需罕见处理即可应酬动态环境。
4. 全身碰撞幸免。收货于 Bernstein 多项式 SDF 的高效猜度,VPP-TC 能接头通盘机器东谈主连杆的几何,而非像 CPIC 那样仅接头终局几个连杆。
5. 被迫性保证。论文在附录中解释了即使在照顾激活时,限制器输出的力矩仍保执任务空间被迫性 —— 照顾反作使劲要么被阻尼耗散,要么被照顾反力经受,不向环境注入净能量。
当年标的:现时框架假定精准的能源学模子。作家接洽在当年使命中接头有界的模子概略情味,瞎想在建模罪状下仍能保证可行性的鲁棒限制器。
六、追思
VPP-TC 为被能源矩限制的安全性问题提供了一套优雅而高效的处分决议。它将可行性表面与数据驱动学习相联接,在增广情景空间中构建安全集结,并通过 QP 及时求解力矩照顾。这一框架在 IROS 2025 两个 Workshop 上分辨获取 Best Contribution Award 和 Best Student Paper Award,并被 ICRA 2026 请托,充分体现了其学术价值和应用后劲。对于顺心东谈主机交互安全、力矩限制以及机器东谈主安全保险的连络者而言,这是一篇值得久了研读的使命。




 备案号:
备案号: